Немного о CAN-шине
Протокол передачи данных шины CAN (Controller Area Network – сеть контроллеров) является стандартом ISO (ISO 11898) в области последовательной передачи данных. Его разработка велась с целью его использования именно на транспорте. Сегодня такая передача данных получила широкое распространение и используется во многих промышленных сферах.
Стандарт CAN состоит из двух частей, собственно технической оснастки (трансивер, витая пара) и собственной программной передачи данных, определяющей различные типы сообщений, алгоритм разрешения сбоев при доступе к шине и защиту от помех.
Цель применения шины CAN в автомобиле - устойчивая связь между блоками управления с помощью цифровой передачи данных, исключающая большое количество проводов.
Техническая оснастка такова, что в каждом электронном блоке имеется электронный компонент так называемый трансивер, как правило, выполненный на базе одной микросхем серии TJA, NSP либо отдельного передающего модуля.
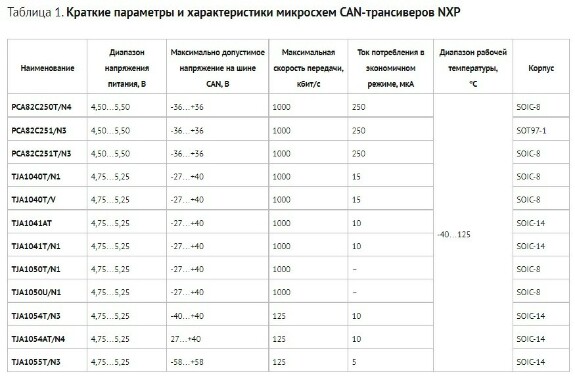
Высокоскоростные CAN-трансиверы компании NXP TJA1040, TJA1041, TJA1050 (табл. 1) основаны на продвинутой технологии SOI – кремний на изоляторе (Silicon-on-Insulator). Благодаря этой технологии новые трансиверы в сравнении с трансиверами предыдущего поколения PCA82C250 и PCA82C251 имеют уменьшенный уровень собственного электромагнитного излучения (20 дБ) и высокую устойчивость к электромагнитному излучению.
Электронные блоки соединены между собой TP (Twisted Pair) линиями, в обычном обиходе называемыми витой парой.
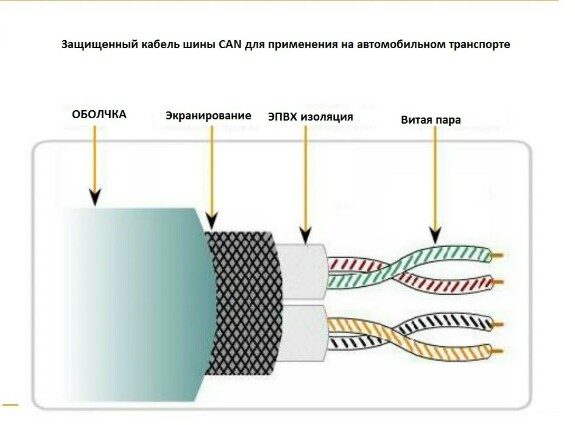
На фото показан кабель с двумя парами витых пар, такие используются для прокладки в автомобиле для объединения в сеть нескольких блоков управления, скажем двигателя и трансмиссии. Стоит отметить, что на автомобиле может быть использовано несколько шин CAN линий (климат контроль, управление оборудованием комфорта и так далее)
Сама витая пара в зависимости от шины в которой она используется может быть определенного цвета. За основу принимается оранжево черный провод и оранжево коричневый. Оранжево черный означает CAN-HIGH (высокоскоростную линию), а оранжево коричневый CAN -LOW (низкоскоростной канал для дескритезации возможных помех передаваемых по основному каналу) ЗАПОМНМИТЕ! При двойном обозначении цвета (скажем в электросхеме) первым прописывается цвет провода, вторым цвет полосы на нем.
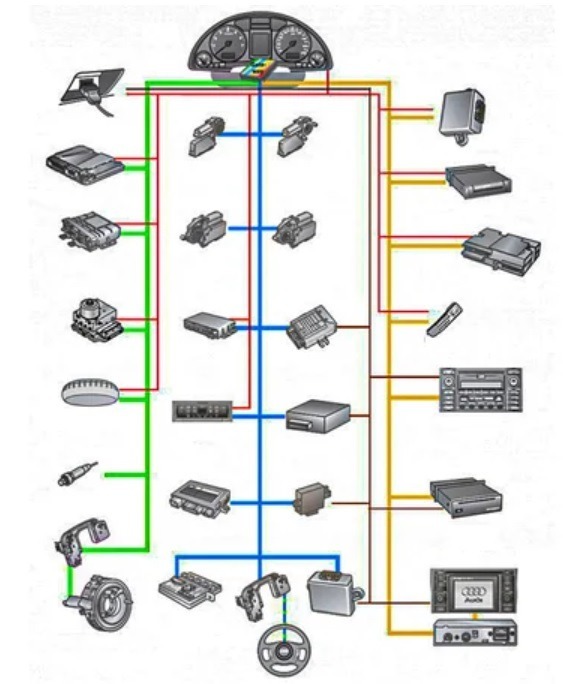
Примерно так, как на рисунке CAN шины соединяют электронные блоки современного авто, передавая им и обмениваясь с ними различной информацией (заложенной производителем согласно логики работы) с помощью сигналов. Сигналы интерпретируются блоками управления в команды, создавая логическое управление.
Сигналы рассылаются по витой паре трансивером или приемопередатчиком. Он нужен для целого ряда задач – усиления сигналов, защиты линии в случае повреждения CAN-шины, создания условий помехозащищенности передаваемых импульсов и регулировки скорости их передачи. В автомобильной промышленности применяются передатчики двух типов с говорящими названиями High Speed и Fault Tolerant. Первый обеспечивает передачу данных на высокой скорости, до 1 мегабита в секунду. Второй не столь быстрый и передает в секунду до 120 килобит в секунду, но при этом допускает отклонение от параметров CAN-шины и не столь чувствителен к ее качеству (свойства дискретизации нужны для того, чтобы исключать возможные ошибки связи и обеспечивать логику работы).
Каждый электронный блок объединенный в шину CAN имеет входное сопротивление, обычно 120 Om. Коммутация CAN шины обеспечивается межсетевым интерфейсом, который аппаратно может быть встроен в электронный компонент, например, в панель приборов или выполнен в виде отдельного модуля.
!Запомните, если какой то компонент шины CAN неисправен, то этот компонент может "посадить" всю шину. Из опыта, чтобы выявить неисправный электронный компонент в шине, можно использовать способ отключения, либо же установить дополнительное сопротивления (подавляя сигнал) до определенного значения, чтобы выявить неисправный блок.
Также стоит отметить, что работа CAN-шины обеспечивается напряжением от 0-5V. 5 Вольт - это максимальное ее напряжение. Таким образом амплитуда сигнала не может превышать 5V. Обмен сигналами электронных блоков хорошо может диагностировать осцилограф.
Скорость передачи для блоков объединенных в одну шину не может быть разной, максимальное ее значение 1 Мегабит в секунду, что обеспечивает прохождение сигналов на 40 метров, не более 1 секунды.
Не стоит забывать, что совершенствование сетевых протоколов, уже сейчас позволяет несколько изменять привычный протокол передачи CAN шины. В современном автомобилестроении уже сейчас можно наблюдать присутствие
LIN - шины передачи данных
MOST
BLUETOOTH
На следующем занятии мы разберем. Прохождение сигналов, преобразование их в отдельные команды и управление различными исполнительными устройствами.